


DRONES JUEGAN QUEMADOS CON DETECCIÓN DE OBSTÁCULOS
Investigadores de la Universidad de Zúrich desarrollaron un nuevo sistema que permite a los drones esquivar obstáculos de alta velocidad, así que, ¿por qué no jugar quemados con ellos?
Según los investigadores, la mayoría de los sistemas actuales para evitar obstáculos tardan entre 20 y 40 milisegundos en procesar los cambios en su entorno.
Eso está bien para un dron que se acerca suavemente a un edificio y encuentra su camino hacia el interior, pero no es rival para obstáculos que se mueven rápidamente como pájaros u otros drones.
Asimismo, eso hace que la navegación sea un problema en ciertas situaciones, como cuando hay muchos drones juntos o en entornos dinámicos como zonas de desastre, o cuando un dron solo necesita moverse rápido.
El nuevo sistema se detalla en la investigación publicado en la revista Science Robotics.

¿CÓMO FUNCIONA?
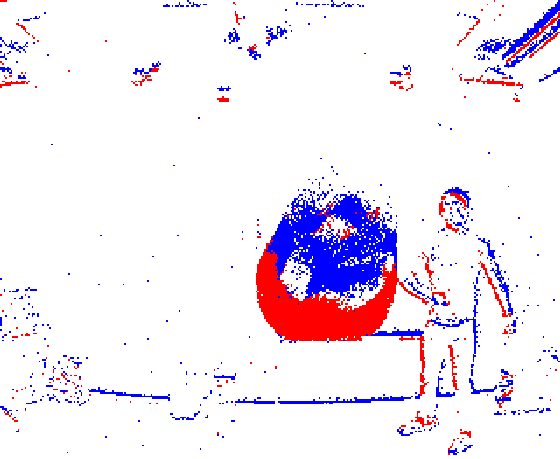
Básicamente, el sistema utiliza algo llamado «cámara de eventos«, un tipo de sensor inspirado en la visión humana.
Las cámaras de eventos capturan el mundo en un flujo continuo de información, actualizando píxeles individualmente cuando el brillo ha cambiado en lugar de disparar la escena completa una y otra vez como una cámara de video tradicional. Esto les permite responder en microsegundos, lo que los hace ideales para capturar imágenes en cámara superlenta , así como aplicaciones científicas.
Combinando este tipo de cámara con un algoritmo, fue así como los investigadores crearon un sistema que detecta y reacciona a los objetos en movimiento mucho más rápido que cualquier otro.
¡HORA DE PROBARLO!
Después de probar y ajustar, los algoritmos son lo suficientemente rápidos como para que los drones puedan determinar que un objeto se acerca y se aparta del camino.
El equipo de Zurich descubrió que las cámaras de eventos existentes no estaban sintonizadas para su uso con drones. Así que para adaptarse, desarrollaron sus propios algoritmos que no solo vigilan todos los «eventos» de píxeles a la vista, sino que también corrigen el movimiento del dron en tiempo real.
La primera ronda de pruebas involucró solo las cámaras, ya que el equipo arrojó varios objetos a las cámaras para probar qué tan bien el algoritmo podía detectarlos. Dependiendo del tamaño del objeto y de qué tan lejos se arrojó, el sistema tenía una precisión del 81 al 97 por ciento.


